机器人奇异性介绍
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2024.3.14 | v0.1 | 初始化文档 | 袁紫衣 |
| 2024.3.20 | v0.2 | 增加控制部分 | 高振宇 |
| 2024.3.21 | v0.3 | 增加规划部分 | 赵锦强 |
[TOC]
1. 什么是奇异点
通常说的奇异即运动学奇异(kinematic singularity): 是指在其在构型空间中,存在某一构型,使得其对应雅克比矩阵的秩维度减少,机器人末端在一个或多个方向,失去了运动的能力。
运动学奇异点的出现通常与机器人的运动学参数和几何结构有关,从机构学(线几何)来讲,常见的运动学奇异包括以下几种:
- 两个或多轴共线
- 三轴或多轴共面且平行
- 四个旋转关节轴线交于一点
- 四个旋转轴共面
- 六个旋转关节轴相交于一条公共线
AUBO-I 系列的运动学奇异点
机器人的运动学奇异可以通过雅克比矩阵是否满秩(行列式是否为0)来进行判断:
对于 AUBO-I 系列,其雅克比的行列式的值的表达式为:
detJ = (a2 * sin(q2) + a3 * sin(q2 - q3) + d5 * sin(q2 - q3 + q4))*sin(q3)*sin(q5); // 其中a2,a3,d5为结构参数
存在三种奇异构型:
,称为 肘部奇异(Wrist Singularity)
会导致关节2,3,4三个轴线共面且平行,从而导致第二种奇异
, 称为 腕部奇异(Elbow Singularity)
会导致2,3,4,6关节轴平行,交于无穷远处;从而导致第三种奇异;
5,6 轴的交点在1,2关节轴组成的平面时:称为内部奇异
AUBO-I 系列的工作空间
AUBO-I 系列机器人的工作空间是球形的,在球形的边界为工作空间的最大范围。在工作空间的中心,底座关节的正上方和正下方有一个圆柱,该圆柱内部区域也是不可到达的区域,圆柱半径为 ,以下是 AUBO-I5 机器人工作空间示意图:
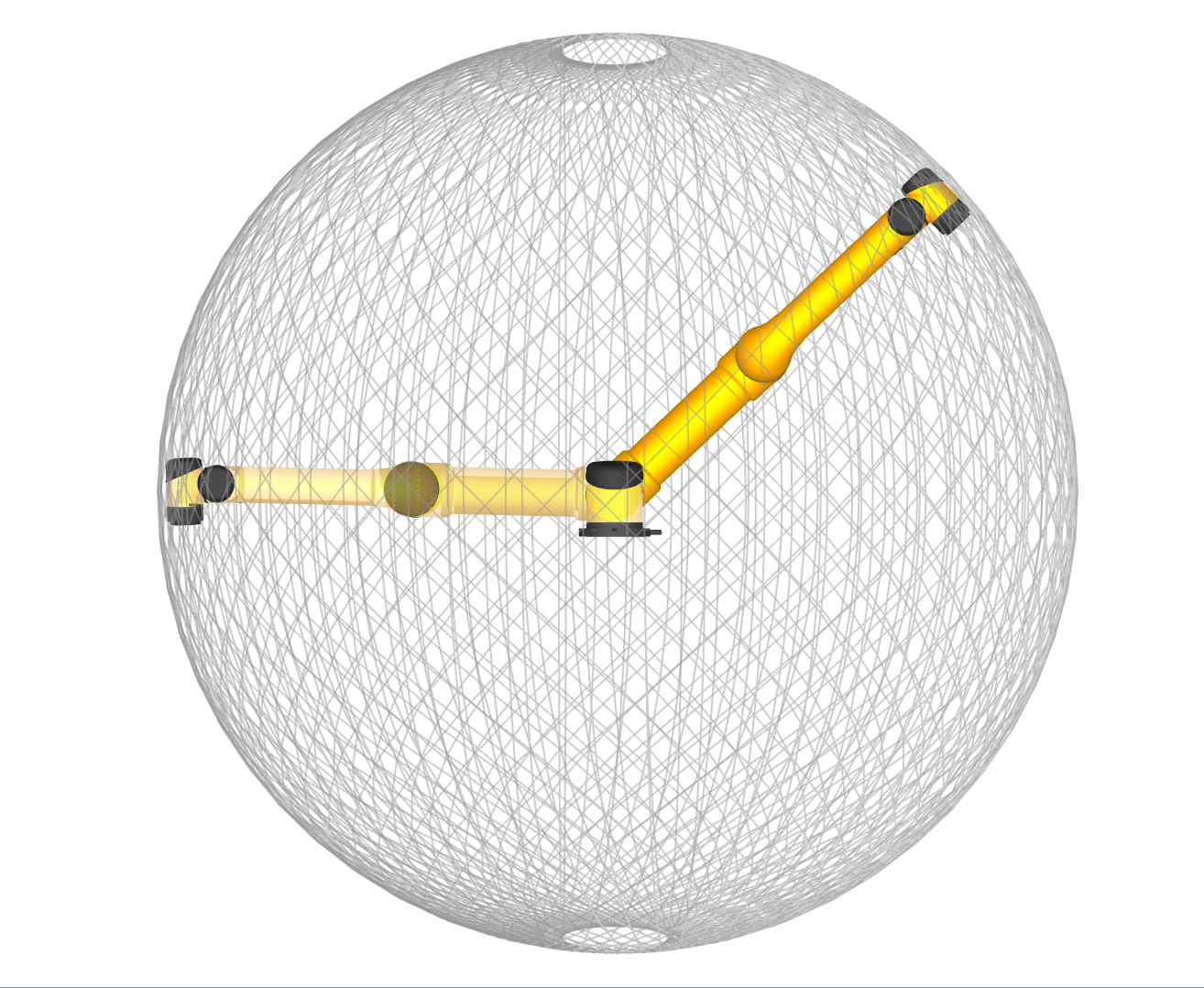
- 当机器人末端到达外部边界时,肘部和腕部均处于奇异状态
- 当机器人末端到达内部边界时,处于内部奇异状态
2 奇异点会产生什么问题
机器人在奇异点附近(奇异空间)运动会导致在运动控制或力控制中,失去某个或多个方向的自由度,运动不稳定,精度降低,控制困难等问题。
逆运动学与奇异空间
AUBO-I 系列机器人逆运动学求解失败主要包括以下两个原因:
- 机器人在物理上无法到达所需位置,目标点位不在工作空间内
- 机器人处于奇异构型
工作空间内的逆运动学
- 已知机器人末端位姿反求关节角
- 非线性方程(三角函数)导致的无解、多解、无穷多解
- 对于AUBO I系列构型非奇异空间内最多存在8个解
- 奇异点通常是无解和无穷多解的情况
- 从解析解角度讲:(如因除0)不能求出每个关节角,但可以求出一些关节角的线性组合,理论上存在无穷多组解或无解
- 从迭代解的角度讲:奇异空间是包含奇异点附近的空间,此时雅克比矩阵病态,迭代逆解计算误差精度降低
- 非线性方程(三角函数)导致的无解、多解、无穷多解
- 已知末端速度反求关节速度
- 速度映射关系: 矢量分别为关节角、末端速度(含角速度)、关节速度。
- 奇异空间内雅克比阵 病态甚至不可逆,此时不能准确的计算出关节速度。
- 属于雅克比矩阵零空间的无论多大都不会对末端速度产生影响。换句话说,在奇异空间附近末端速度即使很小也可能导致关节速度过大。
- 从过速的角度看,通常奇异点出现在机械臂失去自由度的情况,如关节3角度为0或180度。
- 对AUBO机器人来说,雅克比矩阵的秩最小为3,此时对应的奇异空间最难处理。
- 速度映射关系: 矢量分别为关节角、末端速度(含角速度)、关节速度。
力与奇异空间
力域中的雅克比: , 为施加在关节末端的力和扭矩矢量,为各关节所需平衡力矩。 为前面介绍的雅克比阵转置。
- 力域中与运动学中的奇异点一致,因为和的行列式相同。
- 对机械臂的影响:
- 如果属于的零空间,无论多大的都不会在各个关节产生扭矩,会被机械结构限制所消耗。
- 如果正交于的零空间,则末端会沿着的方向无误差的运动。
- 如果介于上述两种情况之间,则末端会沿的非零空间投影方向移动。
3 如何规避奇异点
3.1 逆运动学与奇异规避
在机器人执行任务时,应避免在工作空间边界工作,如果无法避免,在附近区域尽量使用 MoveJ,而不是 MoveL。
解析逆解:理论上存在无穷多组解或无解
迭代逆解:迭代逆精度会降低
可以采用以下方法处理雅克比矩阵病态的问题:
- 阻尼最小二乘算法
- 雅克比转置矩阵算法
- 基于 SVD 分解算法
参考论文:
Overview of Damped Least-Squares Methods for Inverse Kinematics of Robot Manipulators
Singularity-Consistent Parameterization of Robot Motion and Control
SINGULARITY CONSISTENT INVERSE KINEMATICS BY ENHANCING THE JACOBIAN TRANSPOSE
3.2 轨迹规划与奇异规避
轨迹规划中奇异规避采用以下两种方法(主要参考doosan robot的设计方法):
奇异防护转化为最大速度约束
根据关节最大运动速度和关节极限位置限制,实时计算机械臂运动过程中关节的运动能力
根据关节空间最大和最小速度,以及笛卡尔空间运动方向,实时计算在指定构型下的笛卡尔最大速度
/** * @brief 计算在指定构型下的笛卡尔空间最大线速率和最大角速率(如果当前的速率为零, 则返回的是绕X轴方向的最大速率) * @param jac: 传入的雅克比矩阵(在指定构型下的TCP相对Base的几何雅克比) * @param max_joint_velocity: 关节最大速度 * @param min_joint_velocity: 关节最小速度 * @param cur_cartesian_velocity: 当前速度(TCP在Base下的描述) * @return: 返回笛卡尔空间的最大速率(第一个维度表示移动, 第二个维度表示转动) */ Vector2d calMaxCartesianVelocity(const Jacobian& jac, const JntArray& max_joint_velocity, const JntArray& min_joint_velocity, const Twist& cur_cartesian_velocity) = 0;对机械臂进行动态调速,避免在奇异位置关节超速
- 躲避规划:运动过程中若靠近奇异位置附近,机械臂自主进行躲避规划,在远离奇异位置后回到原路径进行运动
3.3 力控与奇异规避
力控中奇异规避采用以下3种方法:
奇异防护转化为变导纳参数设计
控制器输入之前,建立奇异指标与导纳参数之间的映射关系
使用一种新的指数衰减最小二乘法(EDLS)来处理 Singularity。这种方法可以平滑地减小机器人在 Singularity 方向上的运动,从而避免不稳定的运动
使用一种非对称阻尼方案,当机器人远离 Singularity 时减小阻尼,从而改善了机器人的响应能力,提高了操作员的交互体验
具体的阻尼方法也可以使用模糊规则进行设计
奇异防护转化为虚拟力设计
控制器输入之前,建立奇异指标与虚拟力之间的映射关系,虚拟力的设计要考虑远离还是接近奇异点
奇异防护转化为最大速度约束
控制器输出之后,将奇异问题转化为笛卡尔空间Base坐标下的最大速度约束问题,一般来说
关节空间最大速度有两个来源:
用户输入
电机最大运动能力
笛卡尔空间最大速度有两个来源:
- 用户输入
- 关节空间映射
其中,关节空间映射到笛卡尔空间最大速度由正运动学计算,当机器人处于奇异位姿时,因为关节空间最大速度有两种来源,则可计算出两种笛卡尔空间的最大速度,再加上用户输入的最大速度。因此,最终综合约束条件
参考论文:
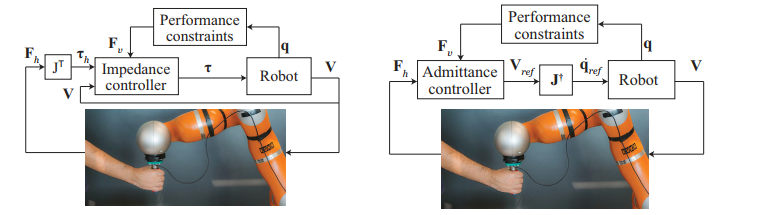
Learning optimal variable admittance control for rotational motion in human-robot co-manipulation
A framework for singularity-robust manipulator control during physical human-robot interaction
Manipulator performance constraints in human-robot cooperation